

 联系我们
联系我们

ABB的核心技术是运动控制系统,这也是对于机器人自身来说的难点。掌握了运动控制技术的ABB可以轻易实现循径精度、运动速度、周期时间、可程序设计等机器人的性能,大幅度提高生产的质量、效率以及可靠性。
1. IRC5 Programming Basic,系统启动方式。
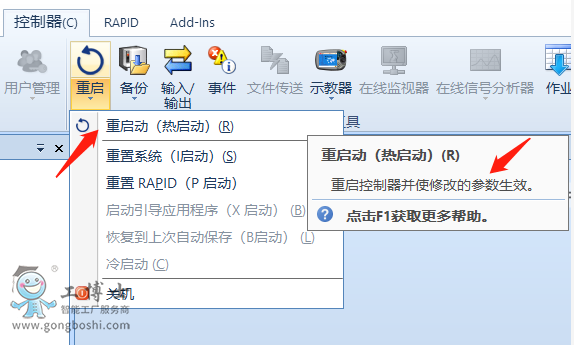
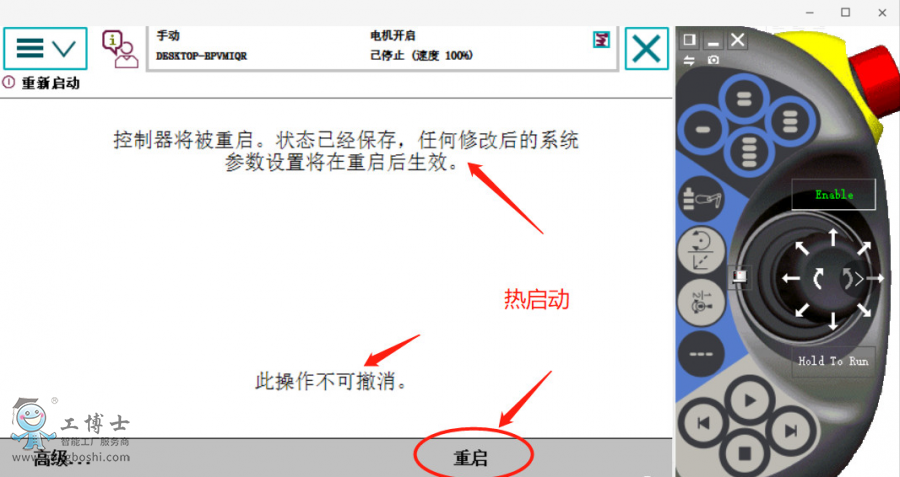
W-start (warm restart) 热启动
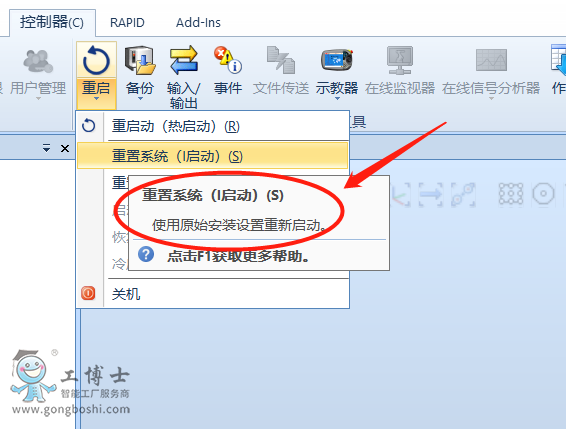
I-start (installation restart)
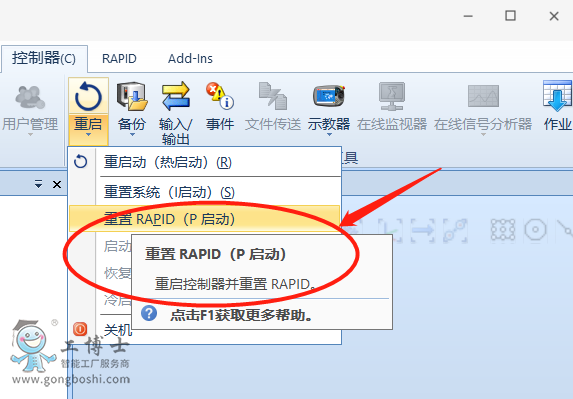
P-start
X-start (xtra restart)
B-start
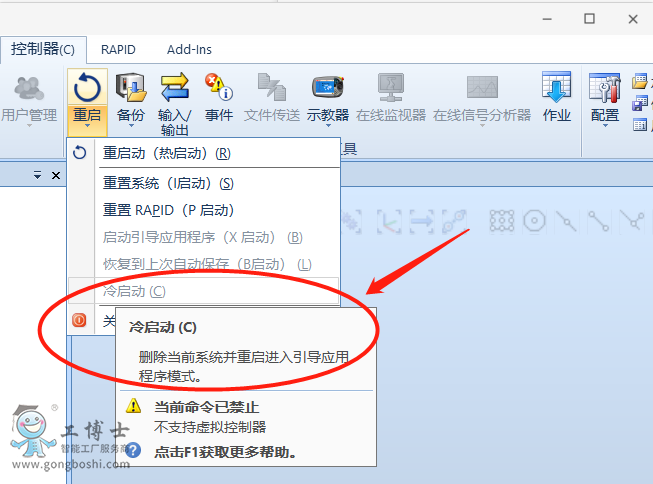
C-start (cold restart)
3. W-start(热启动) :重启当前系统
系统动作:
停止当前系统
所有系统参数以及程序被保存到image文件
在重启过程中系统状态被恢复,启动static和semistatic任务,程序从程序指针停留的位置启动(ABB喷涂机器人)
激活改变的系统配置
RobotStudid防真软件启动

示教器启动

系统动作:
l-start之后,系统将恢复到刚刚装好系统时的默认状态,对系统参数或其他设置所做的任何修改都将丢失

系统动作:
P-start可以让系统得以恢复,但是手动装载的程序和模块除外,所有的static和semistatic任务都将从头开始执行,所有的模块都将按系统配置从新装载,系统参数不变

系统动作:
当前系统停止运行所有程序及系统参数可以保存到image文件,以后可以恢复可以选择其他系统启动

系统动作:
当前系统由于关机时无法正确保存image文件,而导致系统处于系统失败状态, B-start可以让系统以*近一次成功关机时保留的系统数据来启动系统

系统动作:
当前系统停止运行系统文件夹下的所有内容、程序和备份都被删除,这意味着该系统将不可能被恢复,需要安装新系
ABB机器人手册